项目介绍
项目来源:中广核技术攻关项目
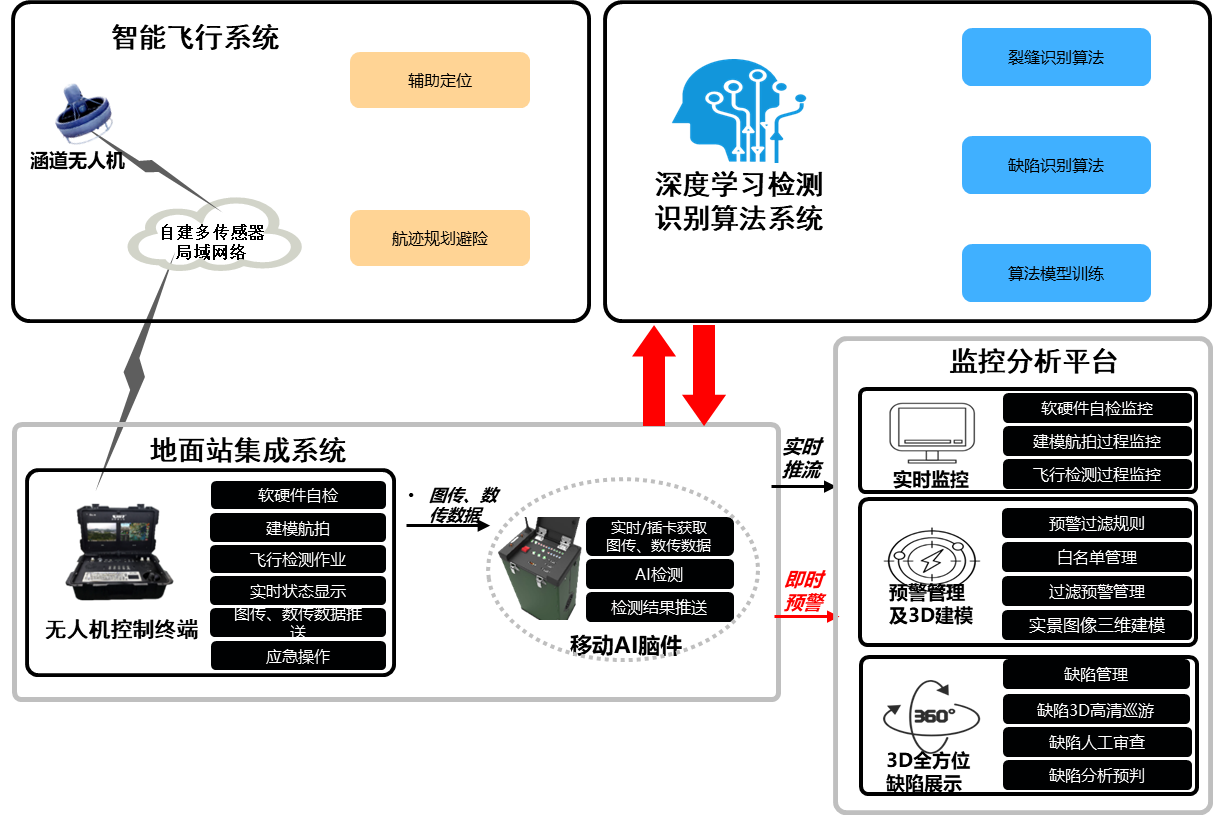
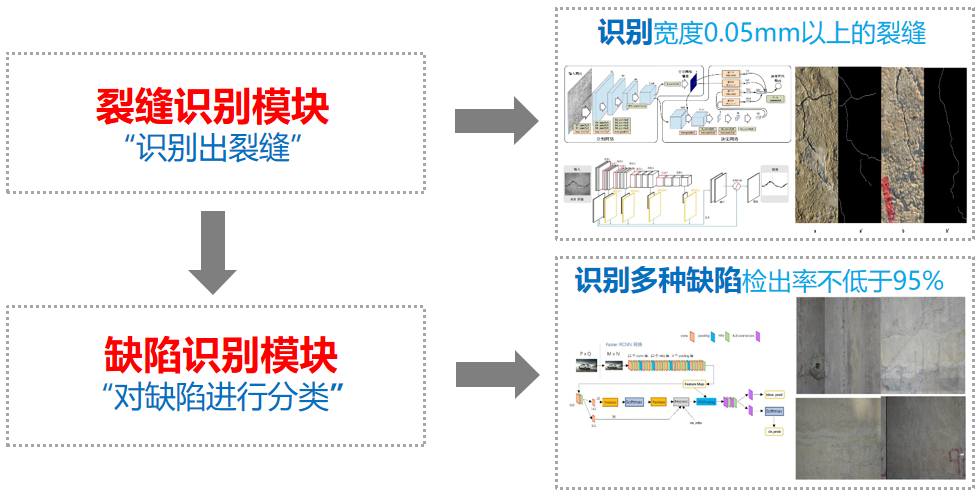
核电站的安全壳结构是核反应堆的保护结构,是继核燃料包壳的最后一道安全屏障。本项目旨在研发一套核反应堆安全壳结构表面缺陷检测的智能空中机器人系统:智能飞行器可以沿预设计规划的飞行路径自动飞行,利用平台上搭载的高性能图像传感器,对安全壳外表面(穹顶、环梁、扶壁柱、筒身等)进行全范围连续自控摄影拍照;开发基于深度学习的裂缝及缺陷识别检测算法,对照片中的缺陷及裂缝进行识别并重定位;开发集成系统、监控分析平台,实现缺陷裂缝统一管理分析及WebCAD三维展示。
研究方案
创新之处
1、基于OBS模型、VIO模型和IMU运动模型的多传感器融合定位算法。能在无GPS、北斗信号情况下,准确提供飞行器的姿态位置信息,并实现多传感器融合定位坐标系与CAD三维坐标系的映射。
2、基于旋转不变形的目标检测算法,基于对抗生产网络的语义分割算法,极大的提高了裂缝,缺陷的识别率。
3、自主研制的载重比极高的涵道式飞行器及飞控系统,在保证机体较小便于穿过复杂地形的前提下,满足高清图像获取设备的负载要求。
4、构造一体化智能计算车和监控分析平台,实现地面站控制系统和AI脑件的集成化,监控分析的智能化。